闖過「黑色720秒」 大陸「嫦娥三號」成功登月

中國大陸研發的「嫦娥三號」探測器於14日21時12分成功着陸於月球虹灣地區,這是人類第130次探月活動,也使中國成爲世界上第三個有能力獨立自主實施月球軟着陸的國家。由着陸器和「玉兔號」月球車組成的嫦娥三號月球探測器總重近3.8噸。在接下來的幾個小時裡,「玉兔號」將駛離着陸器,開始爲期約3個月的科學探測,着陸器則在着陸地點進行原地探測。
12月2日1時30分在西昌衛星發射中心發射升空的嫦娥三號,是中國發射的第一個地外軟着陸探測器和巡視器,也是在1976年蘇聯月球24號探測器登陸月球后第一個重返月球的人類探測器。
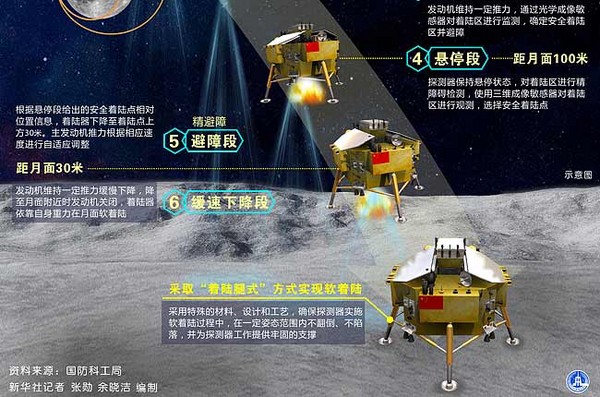
根據陸媒報導,落月是從15公里高度開始的,大約12分鐘的落月過程中,嫦娥三號經歷與地球失去聯繫的「黑色720秒」,而在整個過程中,嫦娥三號依靠自主控制,經過了主減速段、快速調整段、接近段、懸停段、避障段、緩速段等六大階段,相對速度從每秒1.7公里逐漸減爲0。在距離月面100米高度時,探測器暫時停下腳步,利用敏感器對着陸區進行觀測,以避開障礙物、選擇着陸點。在以自由落體方式走完最後幾米之後,平穩「站」上月面的4條着陸腿觸月信號顯示,嫦娥三號完美着陸。
嫦娥三號任務測控通信指揮部指揮長、北京航天飛行控制中心主任陳宏敏表示,針對嫦娥三號任務技術跨度大、狀態變化多、技術要求高的情況,北京飛控中心突破了五項核心關鍵技術。
一是高精度月面視覺定位技術:巡視器月面遙操作要利用探測器下傳的圖像數據,進行高精度視覺定位,只有定位準確才能確定往哪裡走、去哪探測。中心採用多項新技術新算法,實現了月面巡視器的高精度定位。
二是月面巡視動態規劃技術:月面環境複雜地形多樣,巡視探測要結合實時獲取的地形數據進行動態規劃。技術人員設計了基於規劃圖的狀態空間前向搜索算法,構建了三層規劃模型,解決了路徑規劃與巡視勘察自動驗證和動態改進的難題。
三是巡視器行走控制技術:地面需要控制巡視器規避各類月面障礙,實現安全的月面行駛控制。中心通過建立月面綜合環境模型,設計了里程最短、能源最省等最優路徑搜索算法,控制巡視器實現盲走、自主規劃避障等多種移動方式。
四是巡視器可視化操作與控制技術:實現遙操作控制可視化是地面指揮決策的重要輔助手段。中心建成了月球車手動駕駛系統,應用立體顯示技術,實現了人在迴路進行控制的遙操作環境。
五是多體制深空干涉測量數據處理技術:針對佳木斯、喀什兩個新建深空站發射雷達波束的處理,中心突破了差分單程測距、同波束干涉測量等數據處理技術,爲探月軌道確定和月面高精度定位提供了新手段。
相關資訊
 快訊/全球第三 陸嫦娥三號21:11登月成功
快訊/全球第三 陸嫦娥三號21:11登月成功- ▣ 嫦娥六號成功着陸月背
- 陸「嫦娥三號」登月成功 科學家們激動互相擁抱!
- ▣ 嫦娥五號成功落月!
 嫦娥三號成功登月 中國五星旗飄揚太空
嫦娥三號成功登月 中國五星旗飄揚太空 陸探測器「嫦娥三號」 成功從月球背面降軌
陸探測器「嫦娥三號」 成功從月球背面降軌 陸「嫦娥三號」登月 選虹灣有五大理由
陸「嫦娥三號」登月 選虹灣有五大理由- ▣ 陸嫦娥三號奔月 登陸點命名「廣寒宮」
- ▣ 快訊/嫦娥登月了!陸嫦娥五號探測器順利着陸月球
 “大火箭”成功送“嫦娥五號”奔月!揭秘三大看點
“大火箭”成功送“嫦娥五號”奔月!揭秘三大看點 嫦娥三號登月成功 航太人員驚呼:完美得出乎意料!
嫦娥三號登月成功 航太人員驚呼:完美得出乎意料! 嫦娥5號登月成功 將採集月球土壤再返回
嫦娥5號登月成功 將採集月球土壤再返回 嫦娥五號着陸器研製成功 探月「三步走」要帶回土壤
嫦娥五號着陸器研製成功 探月「三步走」要帶回土壤 陸嫦娥五號成功返回地球 攜帶月球土壤
陸嫦娥五號成功返回地球 攜帶月球土壤- ▣ 嫦娥四號成功着陸:看,這就是月亮的背面
- ▣ 嫦娥六號成功發射
 嫦娥六號登月艙成功着陸內蒙古 獲得月球背面砂石樣本
嫦娥六號登月艙成功着陸內蒙古 獲得月球背面砂石樣本 陸太空船12月登月 「嫦娥三號」抱「玉兔」一起升空
陸太空船12月登月 「嫦娥三號」抱「玉兔」一起升空 亞洲最大「聽天耳」 2013助嫦娥三號登月
亞洲最大「聽天耳」 2013助嫦娥三號登月- 陸「嫦娥三號」14日登月 繼美蘇後第三個政治實體
 嫦娥五號“挖土”歸來!中國探月工程嫦娥五號任務取得圓滿成功
嫦娥五號“挖土”歸來!中國探月工程嫦娥五號任務取得圓滿成功- ▣ 空中直擊嫦娥六號返回器成功着陸
- 嫦娥五號成功落月!揭秘其中技術→
- ▣ 嫦娥五號成功進入月地轉移軌道
- ▣ 嫦娥四號達成登月1000天里程碑!
- ▣ 美國又要抄作業了:月球着陸器山寨嫦娥三號,事關登月成敗
- 陸「嫦娥六號」成功着陸月球背面 將實施人類首次「月背採樣」
- 嫦娥五號成功發射 美NASA盼陸分享資訊
- ▣ 嫦娥六號返回器在預定區域成功着陸