湯洪波太空吃播能有多少種姿勢?奇奇怪怪,可可愛愛
(原標題:湯洪波太空吃播能有多少種姿勢?奇奇怪怪,可可愛愛)
【湯洪波太空吃播能有多少種姿勢?奇奇怪怪,可可愛愛!】飄着吃、頭下腳上吃、轉着圈圈吃、“側躺”在地上吃……航天員湯洪波,連吃飯都在“放飛自我”!看#航天員在中國空間站內的日常#↓網友:看着看着,嘴角不自覺上揚!
延伸閱讀
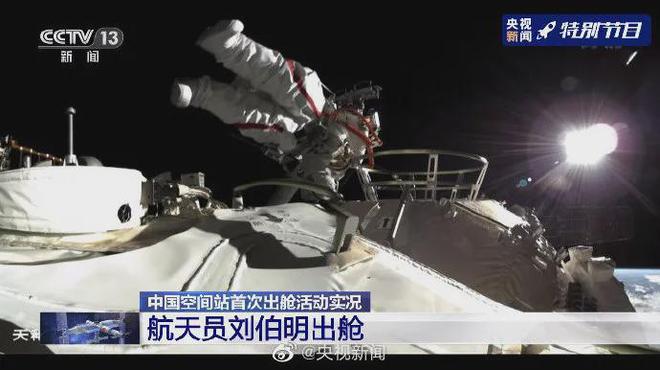
據央視新聞客戶端消息,據中國載人航天工程辦公室消息,北京時間2021年7月4日8時11分,航天員劉伯明成功開啓天和核心艙節點艙出艙艙門,截至11時02分,航天員劉伯明、湯洪波身着中國自主研製的新一代“飛天”艙外航天服,已先後從天和核心艙節點艙成功出艙,並已完成在機械臂上安裝腳限位器和艙外工作臺等工作,後續將在機械臂支持下,相互配合開展空間站艙外有關設備組裝等作業。期間,在艙內的航天員聶海勝配合支持兩名出艙航天員開展艙外操作。
“這外邊太漂亮了!”航天員出艙視頻曝光(來源:本站)
▲劉伯明感嘆:哇,這外面太漂亮了。視頻自央視新聞

這也是繼神舟七號飛行乘組順利完成出艙任務後,時隔13年,中國航天員再次執行出艙任務。這次出艙,空間站的機械臂首次配合航天員共同執行任務。
━━━━━
130公斤航天服,進入只需5分鐘
據介紹,新一代“飛天”艙外航天服經改進後,能滿足身高1.6米到1.8米的人穿着,還能根據航天員的體型進行調整;雖重達130公斤,但穿脫方便快捷。
━━━━━
三名航天員都有哪些任務?
在這次出艙任務中,三名航天員都有哪些任務?彼此之間又是如何分工的呢?一起來了解一下!
太空出艙三位航天員如何分工(來源:視頻綜合)
三名航天員,分工明確!
出艙的兩名航天員,一人要爲機械臂安裝上臂支架,包括腳限位器、工具臺等,隨後藉助機械臂進行移動。另一名航天員藉助艙壁上安裝的扶手,爬行一段距離到作業點進行輔助工作,其間還要進行一次應急返回驗證。
中國航天員科研訓練中心選訓室主任 王焰磊:因爲航天員在艙外做一些作業任務的時候一旦出現緊急情況,那麼航天員必須要快速、緊急返回到氣閘艙裡邊,然後用我們艙載的應急供氧來保證生命安全,所以也要做這方面的驗證。
此次出艙活動的另一項重要工作,就是進行艙外全景攝像機的擡升。
中國航天員科研訓練中心選訓室主任 王焰磊:事先,攝像機由於發射的外暴露的限制,把攝像機安裝在了一個比較低的位置,它的視場角還是有限的,入軌之後,航天員根據任務需要,需要擴展攝像機的視角來監視整個艙外的情況,需要航天員去把這些攝像機安裝一個支架,架得更高一點。
艙內航天員:操作控制機械臂
兩名航天員出艙過程中,艙內航天員需要對機械臂進行操作,雖然地面人員也可以對機械臂進行大範圍轉移,但在有航天員站在機械臂上的時候,艙內航天員可以更直觀的對機械臂位置進行觀察,更能與艙外航天員進行直接交流。
中國航天員科研訓練中心選訓室主任 王焰磊:那麼這個時候呢,因爲我們地面的監控手段是有限的,所以需要艙內的航天員和艙外的航天員之間通過話音溝通,包括艙內的航天員通過仿真軟件和他看到的圖像,進行一些判斷來進行操控。
另外,由航天員自主操作機械臂,在安全性上也有更好的保障。
中國航天員科研訓練中心選訓室主任 王焰磊:一方面是通過我們仿真軟件的預警功能,另外一方面,艙外航天員和艙內航天員都有急停裝置,艙外的航天員在運動過程中如果一旦發現有碰撞的可能、風險的話,他可以直接按下急停裝置,機械臂就會停止工作,也是保證安全的多重手段。
通過航天員在中國空間站的首次出艙活動,航天員出艙能力、應急能力都能夠得到有效驗證,特別是在艙外進行長時間工作,人與裝備的結合爲後續航天員對空間站進行維護提供了寶貴經驗。
延伸閱讀
中國空間站航天員首次出艙活動:兩名航天員出艙 機械臂運送+自主爬行
這次出艙任務,航天員劉伯明要在機械臂的輔助下前往作業點,航天員湯洪波則要通過艙外自主爬行前往作業點。那麼,他們各自提前會做什麼準備工作?通過怎樣的路徑到達作業點呢?
航天員出艙前,需要在節點艙做一系列出艙準備,這個過程往往也持續兩到三個小時。
航天科技集團五院空間站總體總裝副主任設計師 刁常堃:第一次出艙的時候,咱們腳限位器、操作檯、通用把手、電動工具這些東西也需要提前放到咱的節點艙,然後兩套航天服提前做好氣密性檢查,還有相關的一些準備工作,然後準備工作完成以後,再把三象限的艙門進行打開,咱們在艙裡面也是專門設計了一種腳踏板,便於航天員進行一個身體的限位,把艙門打開之後,咱們的航天員再進行出艙。
準備工作完成之後,兩名航天員將通過出艙口出艙。在節點艙專門爲航天員安裝了環形扶手,空間站外還安裝了多種艙外扶手,幫助航天員在艙外更順利地爬行。
航天科技集團五院空間站總體總裝副主任設計師 刁常堃:其實兩個航天員是不同的路徑,其中主要操作的航天員他是通過咱機械臂然後進行轉移的,然後在出艙之前他會把腳限位器、操作檯裝在咱的機械臂上,然後通過機械臂轉移到作業點。那麼第二個航天員的話是通過主路徑扶手,然後攀爬過來的,相當於兩個路徑上都是進行一個驗證。在節點艙和小柱段之間會有一個長扶手,長扶手就相當於是一個跨艙的扶手。沿着環形的軸向的扶手,然後一直往下走到咱大柱段,可以到達咱們各個需要的維修作業點。
記者:他這次爬行的距離大概得有多遠?
航天科技集團五院空間站總體總裝副主任設計師 刁常堃:從節點艙過來的話大約得有8米左右。咱從作業的任務需求來看,是需要爬行的航天員先到達作業點,因爲他有他自己的任務,然後機械臂上的航天員之後再到。
相關資訊
 奇怪耶你!超可愛妹妹頭卻被嫌 男生最不愛的五種髮型
奇怪耶你!超可愛妹妹頭卻被嫌 男生最不愛的五種髮型 我家柴犬好可愛 日網友貼「怪姿勢萌照」大PK
我家柴犬好可愛 日網友貼「怪姿勢萌照」大PK 鬼鬼躺地「翹屁股前後晃動」 奇妙姿勢網直呼:太可愛
鬼鬼躺地「翹屁股前後晃動」 奇妙姿勢網直呼:太可愛 她畫下狗狗怪姿勢PO網 竟開啓系列接龍…成品可以開怪奇畫展了
她畫下狗狗怪姿勢PO網 竟開啓系列接龍…成品可以開怪奇畫展了 喝煮水餃的湯會很奇怪嗎? 日本人吃蕎麥麪可是必喝這湯
喝煮水餃的湯會很奇怪嗎? 日本人吃蕎麥麪可是必喝這湯- ▣ 怪奇比莉不穿OVERSIZE了!小可愛上街 「超有料」網贊:值得喝采
 可愛頌 看看《幻仙》裡有哪些可愛的怪物
可愛頌 看看《幻仙》裡有哪些可愛的怪物 從沒想刪影片!陳喬恩:愛吃雞睾丸有啥奇怪?
從沒想刪影片!陳喬恩:愛吃雞睾丸有啥奇怪? 奇奇怪怪的小吃 你敢嘗哪個
奇奇怪怪的小吃 你敢嘗哪個 MLB/怪異打擊姿勢 小聯盟打者奇觀
MLB/怪異打擊姿勢 小聯盟打者奇觀- ▣ 奇怪的孿生行星可能是水行星
 愛奇藝被做空 王小川力挺龔宇:愛奇藝根本不可能造假
愛奇藝被做空 王小川力挺龔宇:愛奇藝根本不可能造假 寶可夢5怪談 大蔥鴨瀕臨絕種主因竟然是人類太愛吃牠
寶可夢5怪談 大蔥鴨瀕臨絕種主因竟然是人類太愛吃牠- ▣ 當家裡有個重度潔癖的媽媽,各種奇奇怪怪的規矩多到記不住!
 荷蘭怪奇博物館 性愛、大麻也能展!
荷蘭怪奇博物館 性愛、大麻也能展! 日本正妹來臺專拍「奇怪街景」神人搜出IG:超可愛
日本正妹來臺專拍「奇怪街景」神人搜出IG:超可愛 NBA/林書豪有得玩! 克拉奇超愛搞怪
NBA/林書豪有得玩! 克拉奇超愛搞怪 蔡政府爲何搶加入CPTPP?趙少康曝可能原因:很奇怪
蔡政府爲何搶加入CPTPP?趙少康曝可能原因:很奇怪 這種冰很奇怪 「鮮蚵雪花冰」可以吃半碗已經很厲害了
這種冰很奇怪 「鮮蚵雪花冰」可以吃半碗已經很厲害了- 洪都拉斯愛妻誓言...徐小可秒打斷戳破 他氣到從椅子彈起來:妳很奇怪!
- 她炸可愛章魚竟成「奇怪條狀物」 網驚呼:該打馬賽克
- 妖怪現身?超可愛妖怪村等你來抓妖怪!
- 安靜小狼趴沙發好可愛 多看幾眼驚見「怪怪的」
- 妖怪哪有這麼可愛!《收集妖怪》夜晚不再害怕妖魔鬼怪
- 管理學大師麥可波特:臺灣低薪現象很奇怪
- 湯姆克魯斯爆「管太多」 《神鬼傳奇》北美票房爛怪他?
- ▣ 今晚空降開播!愛奇藝又一部好劇來襲,趙今麥造型可太美了
- 飛機顛簸可抱緊空姐? 網友:難怪很多人愛走道位
- ▣ 外星人登陸!其實這些奇怪的傢伙看久也是蠻可愛的嘛!